 |
||
       |
||
| |
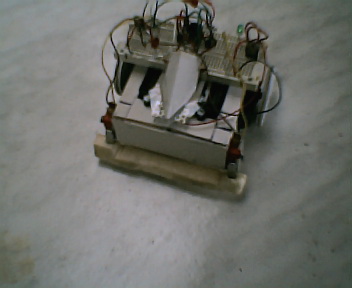 C'est vraiment mon tout premier robot opérationel. Construit sur un coup de tête, il s'est avéré trés fonctionnel. La motorisation était réalisé par 2 servo-moteurs modifiés, un capteur de choc situé à l'avant et une roue folle (située sous le chassis) pour faire un troisiéme point d'appuis à la structure. |
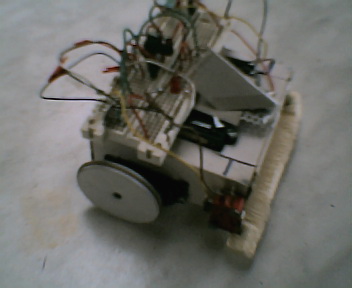 La mécanique: - Construit dans une boite de disquettes, le tout est assé solide aprés quelques consolidations à l'aide de barres de fers et de vis. L'électronique: - Ici on fonctionne au plus simple. Deux photorésistances sont branchées directement sur deux transistors qui alimentent les moteurs. |
|
Améliorations en
cours:
- L'ensemble des composants qui ont constitué ce robot sont aujourd'hui utilisés sur Luxbot. |
||
 Ce site-web a été réalisé pour un affichage de 800*600 ou superieur. |
||
 |
||